

ROBOCUP 2018 Gara Nazionale 11-14 Aprile 2018 a Trento presso Palafiere

Le classi 4 A e 4 B dell'indirizzo elettronico-elettrotecnica dell'ISILTeP (Istituzione scolastica di istruzione liceale tecnica e professionale) di Verrès hanno partecipato alla selezione nazionale della Robocup Jr nella categoria Rescue Line.
I robot Solaris (86° su 120 squadre partecipanti) e Hovercraft (75°/102) delle classi 4 A e 4 B dell'indirizzo elettronico-elettrotecnica.
Sito robocup Trento http://robocupjracademy.it/
Questo è il primo anno che l'indirizzo Elettronico partecipa alla finale nazionale di Robcup, il bilancio è positivo sia per il confronto con squadre di Istituti con molta più esperienza che per i risultati ottenuti.
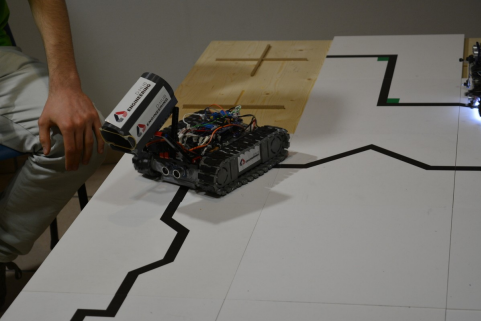
Robot Solaris

Struttura chassis e cingoli
La struttura e i cingoli sono stati progettati e stampati con stampate 3D MakerBOT.
Hardware
Cpu board Arduino Mega
8 x InfraRed line detection
Ultrasonic Object detection
Lipo battery and DC/DC converter
2 x Color Sensor
4 x DC Motor
H bridge L293 board
1 x Servomotor
Robot Hovercraft

Struttura chassis e cingoli
La struttura e i cingoli sono stati acquistati.
Hardware
Cpu board Arduino Mega
8 x InfraRed line detection
Ultrasonic Object detection
Lipo battery and DC/DC converter
2 x InfraRed sensor for color detection
2 x DC Motor
H bridge tb661
RoboCup Rescue Line
Questa competizione internazionale prevede la realizzazione di un robot completamente autonomo che sia in grado di affrontare secondo il regolamento la sfida o il percorso dato.
Le classi hanno partecipato alla Robocup Rescue Line, nella quale i robot devono seguire una linea nera su sfondo bianco, devono essere in grado di affrontare curve, cambi di direzione a 90°, incroci, salite e discese di pendenza non superiore a 30°.
Sul percorso si possono trovare ostacoli di piccolo spessore (esempio una matita) che i robot devono essere in grado di superare senza perdere aderenza.

Esempio percorso RoboCup Rescue Line
Altri ostacoli possibili possono essere oggetti posti sul percorso (esempio bottiglie d’acqua) che i robot devono superare (da destra o da sinistra) senza urtarli e spostarli.
Alla fine del percorso i robot si trovano in una zona dove sono presenti palline (solitamente quelle utilizzate per il ping-pong) che i robot devono essere in grado di raccogliere e posizionare in un contenitore.
Vince la gara la squadra del robot che è riuscita a finire il percorso in meno tempo possibile. La finalità della categoria “Rescue” è quella di creare un robot autonomo capace di superare difficoltà e ostacoli sul percorso, fino ad arrivare al luogo dove sono presenti le vittime (ossia le palline) e non deve essere solo capace di individuarle, ma anche di metterle in salvo.
Sito robocup internazionale http://www.robocup.org/
Sito rete scuole nazionale http://www.robocupjr.it/
Sito gara Vicenza http://www.robocupjrveneto.it
Dichiazioni alunni classe 4A robot Solaris
Bonin Ludovico: interessante perché oltre a gareggiare abbiamo potuto confrontarci e vedere le soluzioni tecniche adottate dalle altre squadre.
Perron Luca: ho visto diverse altre piattaforme per lo sviluppo di robot didattici.
Voyat Mattia: importante conoscere altri studenti e confrontarsi sulle tecniche usate per affrontare questa competizione.
Fakiri Yassin: soddisfatto della bella esperienza.
D'Agosto Gioele: bel progetto che richiedeva ancora un po' di tempo per collaudo e messa a punto. Brunod Alessio: bello aver partecipato con tutta la classe.
Lexert Gilles: bella esperienza, abbiamo visto robot molto avanzati in grado di interagire con gli umani.
Neyroz Samuele: esperienza positiva che ci ha permesso di acquisire nuove conoscenze, di lavorare in team rispettando tempi e regole.
Vaj Piova Stefano: bellissima esperienza che ci ha permesso di confrontarci con squadre di tutta Italia e di vedere le differenti soluzioni tecniche adottate.
Di Ruvo Elia: a differenza delle altre squadre che hanno usato piattaforme commerciali il nostro robot è stato da noi progettato e realizzato con stampante 3D.
Dichiazioni alunni classe 4B robot Hovercraft
Locatelli Simone, Dell'Amico Andrea, Dublanc Lorenzo, Payn François, Leonesio Iacopo, Ruzzon Alex : abbiamo avuto un netto miglioramento rispetto alla precedente selezione territoriale di Vicenza. Il nostro robot è stato migliorato tecnicamente, la strategia di gara affinata. Questa esperienza ci ha permesso di sperimentare lavoro in team sotto pressione, il rispetto di regolamenti e tempi. Grazie all'esperienza acquisita, l'anno prossimo potremo partecipare con migliori possibilità di successo.




Pubblicato da Filippo Bertozzi